Chapter B
Answers to the Exercises
I believe that every human has a finite number of heart-beats.
I don't intend to waste any of mine running around doing exercises.
I don't intend to waste any of mine running around doing exercises.
— Buzz Aldrin (1930–)
B.1Chapter 1
-
[4pt]
[4pt] -
-
See the table below.
Left-handed Right-handed East Up North East Up North East Up North East Up North -
(a) Right-handed. (b) Swap
-
- (a)Right-handed.
-
(b)
-
(c)
- (a) CW (b) CCW (c) CCW (d) CW
- (a) 15 (b) 30 (c) 3840 (d) 2016840 (e) 5050
-
(a) (b) (c) (d) (e) (f) (g) (h) (i) (j) -
(a) (b) (c) (d) (e) (f) (g) (h) (i) (j) -
The scarecrow should have said:
The sum of the squares of the legs of a right triangle is equal to the square of the remaining side.since the Pythagorean theorem is
-
-
(a)
-
(b)
-
(c)
-
(d)
-
(a)
B.2Chapter 2
-
-
-
-
-
- “How much do you weigh?” Your weight is a scalar quantity. But the force of gravity, which pulls you downwards, is a vector, and so if you said that weight was a vector for that reason, you are also correct. (“My weight is 150 lbs of force in the downward direction.”)
- “Do you have any idea how fast you were going?” The officer is probably referring to the speed of your vehicle, which is a scalar quantity.
- “It's two blocks north of here.” Vector quantity.
- “We're cruising from Los Angeles to New York at 600 mph, at an altitude of 33,000 ft.” The speed “600 mph” is a scalar quantity. Since New York is east of Los Angeles, you could reasonably infer an eastward direction, so “600 mph eastward” is a velocity, which is a vector quantity. Likewise, “33,000 ft” is a scalar quantity, although if you're a stickler, you might say that a direction of “up” is implied, in which case “33,000 ft up” is a vector quantity.
-
[4pt]
[4pt] -
- The size of a vector in a diagram doesn't matter; we just need to draw it in the right place. False. This is reversed; for vectors, size matters (meaning the length of the vector), position doesn't.
- The displacement expressed by a vector can be visualized as a sequence of axially aligned displacements. True.
- These axially aligned displacements from the previous question must occur in order. False. We can apply them in any order and get the same end result.
-
The vector
-
-
-
-
-
-
-
-
-
-
-
Define a triangle using the vectors
-
First, let's obtain some information about the vector components.
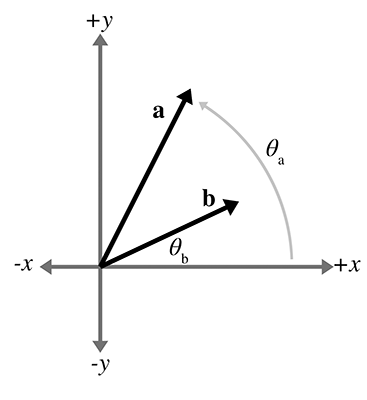
From the figure, we haveNow we can proceed with the algebraic definition of the dot product and the cosine difference identity: -
-
-
Let
-
-
(a)
-
(1)
-
(2)
-
(3)
-
(4)
-
(5)
-
(1)
-
(b)
-
(1)The unit circle for the
-
(2)The unit circle for the
-
(3)The unit circle for the infinity norm is a square with sides of
length
-
(1)The unit circle for the
-
(a)
-
The man buys a box or has a piece of luggage that is
2 feet long, 2 feet wide, and 2 feet tall. If the object
is very thin, such as a sword, then he can put the object
diagonally in the box or luggage. The longest such object
he could carry on is
-
Let
- Left-handed.
-
-
Let
-
Let
-
Let
-
-
Use the sign of the dot product between
Both
The special case of -
-
(1)
-
(2)
-
(3)
-
(4)
-
(5)
-
(6)
-
(7)
-
(1)
-
Use the sign of the dot product between
-
-
To determine whether the point
The value of -
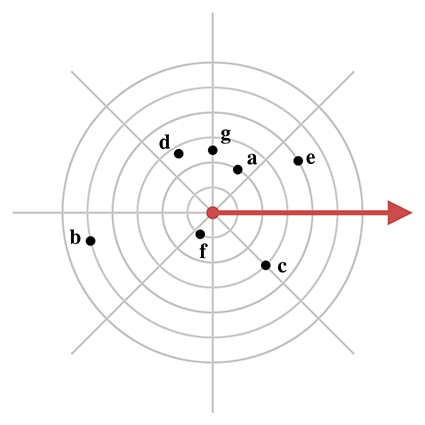
The NPC's FOV is
-
(1)
-
(2)
-
(3)
-
(4)
-
(5)
-
(6)
-
(7)
-
(1)
-
The NPC can see a distance of only 7 units, so only those points that are both
within the FOV and within this distance will be visible.
-
(1)
- (2)
- (3)
- (4)
-
(5)
- (6)
- (7)
-
(1)
-
To determine whether the point
-
-
Let
-
-
(1)
-
(2)
-
(3)
-
(4)
-
(1)
-
Let
-
-
B.3Chapter 3
-
- (a)Object space.
-
(b)We could compare my world-space
- (c)World space.
-
(d)Object space. Or you might say that we could take a dot product
with our facing direction vector—which is equivalent to extracting the
object-space
-
First translate the point by
-
- (a)Linearly dependent. The middle basis vector is the zero vector, which cannot belong to a linearly independent set because it can be expressed as a product of any other basis vector and 0.
- (b)Linearly independent.
- (c)Linearly dependent. For 3D vectors, the largest linearly independent set we could hope for is three vectors, but this set has four.
- (d)Linearly dependent. The last vector is a multiple of the first.
- (e)Linearly dependent. The last vector is the sum of the first two.
- (f)Linearly independent.
-
- (a)Orthogonal.
- (b)Not orthogonal. All of the pairs of vectors have nonzero dot products.
- (c)Orthogonal.
- (d)Orthogonal.
-
(e)Not orthogonal. The first pair of vectors is perpendicular, but
-
- (a)No. The second and third basis vectors clearly do not have unit length.
- (b)No. None of the basis vectors have unit length.
- (c)Yes, they are orthonormal.
- (d)No. The first and second basis vectors are not perpendicular.
- (e)Yes, they are orthonormal.
- (f)Yes, they are orthonormal.
- (g)No. The second and third basis vectors do not have unit length.
-
-
(a)Upright:
-
(b)Upright:
-
(c)Upright:
-
(d)Upright:
-
(e)Upright:
-
(f)Upright:
-
(g)Upright:
-
(h)Upright:
-
(i)Upright:
-
(j)Upright:
-
(a)Upright:
B.4Chapter 4
-
See the table below.
Matrix Rows Columns Square Diagonal 4 3 No No 3 3 Yes Yes 2 2 Yes No 5 2 No No 1 3 No No 4 1 No No 1 4 No No 3 1 No No -
-
-
-
(a)
-
(b)Not possible; cannot multiply a 2
-
(c)
[6pt]
[6pt] -
(d)
- (e)Not possible; cannot multiply a
-
(f)
-
(g)
-
(h)Not possible; cannot multiply a
-
(a)
-
-
(a)
[4pt]
[4pt]
[4pt] -
(b)
[6pt]
[6pt]
[6pt] -
(c)
-
(d)
-
(a)
-
-
(a)
-
(b)
-
(c)
-
(d)
-
(a)
-
For each of the matrices
-
(a)The basis vectors
-
(b)The basis vectors
-
(c)The basis vectors
-
(d)The basis vectors
-
(e)The basis vectors
-
(f)The basis vectors
-
(a)The basis vectors
-
- (a) 3 (b) 1 (c) 4 (d) 2
-
The result vector element
-
The result vector element
-
-
Note that the structure of
-
Note that the structure of
-
-
Note that the structure of
B.5Chapter 5
- Yes, any matrix expresses a linear transformation. Furthermore, because all linear transformations are also affine transformations, the transform is also an affine transformation. (There just isn't any translation in the affine transform, or equivalently, the translation portion is zero.)
-
-
-
-
-
-
-
-
-
(a)
-
(b)Here, we need to take the opposite rotations, in the opposite order.
Or, you might have already known that the result would be the transpose of the answer from the previous problem. If so, good for you.
-
(c)Convert the
-
(a)
B.6Chapter 6
-
-
The determinant is
We compute the cofactorsand put them into the classical adjoint:Dividing by the determinant gives us the inverse:
- The matrix is orthogonal within the appropriate tolerance.
-
Because the matrix is orthogonal, its inverse is simply its transpose:
-
This matrix is a standard affine transform matrix with a right-most
column of
-
-
First, calculate the rotation matrix:
Now concatenate this with the translation matrix from the previous exercise. We know this will simply copy the rotation portion into the upper -
This time we concatenate the matrices in the opposite order,
and the translation portion gets rotated.
-
-
B.7Chapter 7
In some places in this section, we use the notation
to
indicate Cartesian coordinates, and
to indicate
polar coordinates. If plain
coordinates are used, then
the context will make it clear whether the coordinates are Cartesian
or polar.
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
(a)
so -
(b)
so -
(c)
so -
(d)
so
-
(a)
-
-
(a)
so -
(b)
so -
(c)
so -
(d)
so
-
(a)
-
-
(a)
so -
(b)
so -
(c)
so -
(d)
so
-
(a)
-
-
(a1)
-
(a2)
so - (b1)
-
(b2)
so - (c1)
-
(c2)
so - (d1)
-
(d2)
so
-
(a1)
-
-
(a)
so -
(b)
so -
(c)
so -
(d)
so -
(e)
so -
(f)
so
-
(a)
-
- (a)A sphere with radius
-
(b)A vertical plane, obtained by rotating the plane
-
(c)A “right circular conical surface” (two vertical circular cones
meeting tip-to-tip at the origin). The interior angle of the cone is
- (a)A sphere with radius
- She was at the north pole, so the bear was white.1
B.8Chapter 8
- (a) 5 (b) 3 (c) 6 (d) 1 (e) 2 (f) 4
-
- (a)3. Yes, they are canonical Euler angles.
- (b)4. Yes, they are canonical Euler angles.
- (c)5. No, this orientation is in Gimbal lock, and in the canonical set, bank should be zero.
- (d)1. Yes, they are canonical Euler angles.
- (e)2. Yes, they are canonical Euler angles.
- (f)3. No, the pitch angle is outside the legal range.
- (g)5. Yes, they are canonical Euler angles.
- (h)2. No, the pitch angle is outside the legal range.
- (i)6. Yes, they are canonical Euler angles.
-
-
(a)
- (b)All rotation quaternions have a magnitude of 1!
- (c)
- (d)This corresponds to a pitch of +30°.
-
(a)
- (a) 2 (b) 5 (c) 1 (d) 3 (e) 2 (f) 1 (g) 4 (h) 6 (i) 3
- (a) 5 (b) 2 (c) 6 (d) 1 (e) 3 (f) 5 (g) 4 (h) 2 (i) 3
-
-
First, we extract the half-angle and axis of rotation:
Now we form a new quaternion using the new half-angle,
-
-
(a)
-
(b)
-
(c)
-
(a)
-
[12pt] After expanding these products and then canceling terms (a step that we have omitted because it is very messy), we then factor:
B.9Chapter 9
-
First, we convert the ray to implicit form by using
Equation (9.5):
Then, we convert this to slope-intercept form according to Equation (9.6):So the equation of the line is
-
The slope is -
- (a)
-
(b)
-
(c)
-
(d)
-
(e)
-
(f)First, we determine which products to take by using the technique from
Listing 9.4:
Summing the appropriate products, we haveNotice how much larger this box is than the one of the transformed points!
- (a)
-
-
(a)First, let's find the normal by using
Equation (9.12):
Let's normalize it:Just for kicks, we'll verify that we get the same result with Equation (9.13) from Section 9.5.3:Now that we have
-
(b)To answer both questions, we compute the signed distance by
Equation (9.14) from
Section 9.5.4:
Since this value is positive, we conclude that the point is on the front side of the plane.
-
(c)Let's first solve this problem by using the 2D projection method. The
dominant axis of the normal is
-
(d)
-
(e)First, we calculate the side lengths.
-
(f)
-
(a)First, let's find the normal by using
Equation (9.12):
-
Using Equation (9.13):
Normalizing this result, we haveNow the best-fit
-
The
seven-sided polygon is fanned into five triangles. One possible way to fan the
polygon, based on the simple strategy given in
Section 9.7.3, is
B.10Chapter 10
-
This is a straightforward application of Equation (10.2).
-
(a)
-
(b)
-
(a)
-
-
(a)
-
(b)Using the left side of Equation (10.3), we have
-
(c)Using Equation (10.4),
-
(d)Using the right side of Equation (10.3), we have
-
(e)The correct formula is given by Equation (10.3.4).
-
(f)This time we use Equation (10.7).
-
(a)
-
-
(a)
- (b)Same as before, 1.732.
-
(c)
-
(d)
-
(a)
- (a) 2 (b) 1 (c) 4 (d) 6 (e) 3 (f) 5
- (a) 7 (b) 3 (c) 1 (d) 10 (e) 4 (f) 2 (g) 9 (h) 6 (i) 8 (j) 5
-
Here we encode each component by multiplying by 127, adding 128, and then rounding to an
integer. If any answer is off by 1 pixel, that's probably OK. (It's best to make sure
(a) R=0, G=128, B=128 (b) R=162, G=60, B=230 [4pt] (c) R=128, G=128, B=255 (d) R=128, G=237, B=193 -
Tangent-space Model-space normal Binormal normal [4pt] (a) [4pt] (b) [4pt] (c) [4pt] (d)
B.11Chapter 11
-
-
-
- (a)
- (b)
- (c)
- (d)
- (e)
- (a)
-
-
- (a)
- (b)
- (c)
- (d)
- (e)
- (f)
- (g)
-
(h)
- (a)
-
-
- (a)
- (b)
-
(c)
- (d)
- (e)
- (f)
- (g)
-
(h)
- (a)
-
A negative discriminant indicates that the apex of the movement (the farthest
displacement in the direction of the initial velocity) is not large enough to reach
the desired displacement
Note that if the acceleration and the displacement have the same sign, then the discriminant can never be positive, and there will always be two solutions except in the trivial case where all the values are zero. -
-
(a)
-
(b)
-
(c)
- (d)It's twice the time to reach the apex,
-
(e)
-
(a)
-
-
Expanding the Taylor series for
-
This one has a few tricks. First, we need to compute the actual radius of the
orbit, taking into account Earth's (average) radius of 6,371 km, as
Now the length of the circular orbit is just the circumference of a circle with this radius, which can be computed using elementary geometry:Finally, we divide this distance by the average speed to get the orbital period:The centripetal acceleration can be computed by Equation (11.29):
B.12Chapter 12
- We must consider all the forces acting on the fan, the air, and the boat. As the fan rotates, a force exists between the fan and the air, which wants to push the air forward and the fan backwards. Since the fan does not accelerate backwards, we know that there must be some force opposing it, and this force comes from the force of friction provided by the boat. But then this means the boat is receiving a backwards force, and this backwards force counteracts any force eventually received by the wind hitting the sail.
-
First, we identify four bodies: the girl, the boy, the rope, and Earth. Next, we
identify the active tension and friction forces:
By Newton's third law, we assume that each force on the left is equal in magnitude but opposite in direction to the corresponding force on the right. Next, since we assume that the stretching of the rope is negligible, the tension at one end must be equal to the tension at the other end, so all the
- False. The acceleration due to gravity is constant, but the force due to gravity increases proportionately with mass.
-
This is a straightforward application of Newton's law of universal gravitation
with the distance equal to the radius of Earth plus the orbit altitude.
Plugging this value and the mass of Earth into Equation (12.3), we haveWe observe a few things about this result. First, it most definitely is not zero; in fact, it is only about 10%less than the acceleration due to gravity at Earth's surface. Although the term “zero gravity” is often used to describe the environment of objects orbiting in space, we see that this term is a bit of a misnomer, since gravity is quite alive and well, even at 340 km above Earth's surface. In fact, it is gravity that supplies the necessary centripetal acceleration to maintain the orbit.
Second, we compare this answer to our results from Exercise 11.12, and we see that the numbers are the same. (Well, almost exactly the same. The discrepancy of 0.1%is a result of some slight simplifications to the problem and rounding.) This match leads us to answer the second part of the problem. The apparent weightlessness exists because the space station and all the objects in it are in free fall. Apparent weightlessness occurs in any free-fall situation, no matter what the force of gravity and even if the object isn't orbiting (for example, in a falling elevator or amusement park ride or in NASA's “vomit comet” aircraft).
The difference between a falling elevator and an object orbiting Earth is that the free fall in the space station continues indefinitely. The orbit speed and altitude are selected such that the acceleration due to gravity is exactly the same as the centripetal acceleration, and unlike a falling elevator, the space station never gets any closer to the ground. The space station keeps “falling over the horizon” and never hits bottom. -
At the critical angle, the force of static friction
-
-
(a)Hooke's law tells us
-
(b)Substituting into the equation obtained in part (a), we have
-
(c)
- (d)Assuming the spring and environment had not changed, we would expect a 1 kg mass to cause an extension of 2 cm. Since the actual change in length was 8 cm, there are only two explanations.2 Either the spring constant has been reduced or the apparent force of gravity has increased (or both). Maybe the spring was worn out? The increase in gravity could be caused by conducting the experiment on a larger planet or in a noninertial reference frame that is accelerating upwards.
-
(a)Hooke's law tells us
-
-
(a)
- (b)The amplitude is simply the initial displacement, 14.7 cm.
-
(c)We know that the motion of the mass must be of the form
When the mass crosses the rest position,
-
(a)
-
Since there are no external forces, the center of mass of the man + car system does
not move, and the total momentum of this system must remain zero throughout. We'll
let
-
(a)The relative velocity of the man and car is expressed by
and we also know that the combined momentum of the system must remain at zero,Plugging the first equation into the second, we haveSo we obtain the inertial velocity of the man as
-
(b)First, we compute the duration of the journey by considering the man's
motion in the coordinate space fixed to the car, as
We then multiply the velocities of the car and man by this duration to obtain their displacements.An alternate approach is to recognize that the center of mass of the system does not move, since there are no external forces, and treat the man and the car as point masses. Since the man walked the length of the car,Now the movement of the man must be offset by the movement of the car, such that the center of gravity does not shift.One again, the system of equations is solved by plugging the first equation into the second.
- (c)The car's velocity would also increase in proportion to the man's. At all times, the total momentum and total displacement of the center of mass would be zero. The ending configuration of the car and the man would be the same as before.
-
(d)Here all we must do is add +5.00 m/s to our earlier results.
-
(e)
-
(a)The relative velocity of the man and car is expressed by
-
First, we must compute the contact normal
- Because the force of gravity is always directly downwards, the bend in the balance bar causes the lever arm of each side to change depending on the angle of the monkey. For example, if the monkey begins to lean to the left, this rotates the weight on the right end of the pole upwards. In this situation, the force of gravity acts more perpendicular to the bar on the right (the lever arm), and the torque is increased. At the same time, the mass on the opposite end rotates downwards, causing the bar to become more parallel with the force of gravity, thus decreasing the torque. In other words, the restorative torque is always greater than the torque that would tend to tip him over, and when he is upright, they are in equilibrium.
- The hollow cylinder will be harder to roll, because the moment of inertia will be larger. Imagine that the cylinders are made of a compressible substance. Now imagine taking an individual mass element from the center of the solid center and pushing it outwards. As the radius increases, the moment of inertia of this element will increase. This is essentially the difference between the two cylinders, the hollow one has a denser outer ring, with more of its mass pushed outwards.
-
-
(a)First we determine the total mass, which is 2200 kg. Then we take a weighted average
of the mass centers according to Equation (12.22).
-
(b)At the time of this writing, all the formulas are available on the Wikipedia article
List of moment of inertia tensors.
Body front:Body middle:Body rear:Each wheel: -
(c)We apply the parallel axis theorem (Equation (12.31))
to each part. We must first compute the position of each part
relative to the center of mass of the truck, which we denote as
Body front:Body middle:Body rear:Front left wheel:Front right wheel:Rear left wheel:Rear right wheel:Total:
-
(a)First we determine the total mass, which is 2200 kg. Then we take a weighted average
of the mass centers according to Equation (12.22).
B.13Chapter 13
-
-
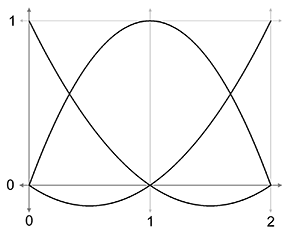
We can solve this exercise several ways, but since this is a chapter on
curves, we wanted you to use the polynomial interpolation
techniques from Section 13.2
to fit a parabola through the “control points” given in the
problem. Those control points just happen to share the
knot sequence from the previous exercise, and we were hoping
you would take advantage of that work. The math starts by multiplying
each Lagrange basis polynomial by the corresponding control point.
-
-
(a)Starting with
-
(b)Applying
Equations (13.32)–(13.35):
-
(c)Using Equation (13.19):
-
(d)
-
(e)Using Equation (13.5):
-
(f)
-
(a)Starting with
-
- All four control points should be in the same place.
-
It's obvious that
This makes sense when you think about what a constant velocity curve looks like in Hermite form. The difference vector
It also makes sense when you think about the Bernstein basis. Remember that each basis function -
We hope you were able to get this one just by thinking about
it. We know that the starting and ending velocities of the curve
are zero, and so in Hermite form the vectors
-
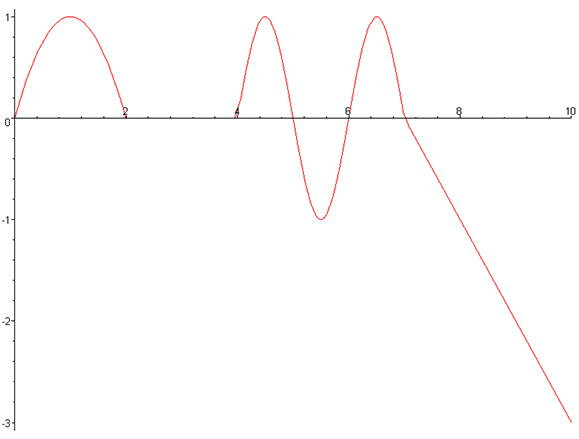
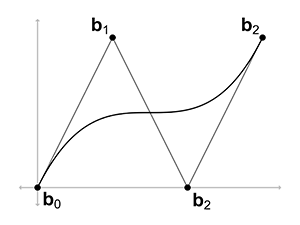
To solve this one, let's convert to Hermite form and examine
the starting and ending velocities:
We know from Exercise 6 that if the interior points are distributed equally, dividing the interval into thirds, then the resulting curve has a constant velocity. But now, the interior control points are farther away from their neighboring endpoint than one-third of the total interval; the distance is equal to the total interval length. So the starting and ending velocities are three times as fast. This means we are starting off “too fast” and will have to slow down in the middle somewhere, and then accelerate back up to the high velocity at the end. How slow do we have to go? Let's plot the curve to see.
Here the control points are spaced evenly on the -
We can solve this algebraically. First, we need to convert
our answer from Exercise 2
into a curve in monomial form with a normalized parameter.
Remember that the curve is traced out as
-
Our first task is to convert the curve from functional the form
The
Putting all this together, our four Bézier control points are -
-
(a)For the first control point, we do regular de Casteljau using 0.2 for each round.
For the second control point, we do the last round using the fraction 0.5.For the third control point, we do the last two rounds using the fraction 0.5.For the final control point, we do all the rounds using 0.5 as the fraction.
-
(b)
-
(c)Using Equation (13.38) with
-
(a)For the first control point, we do regular de Casteljau using 0.2 for each round.
B.14Chapter 14
Forty-two.
For every complex problem
there is an answer that is clear, simple, and
wrong.
there is an answer that is clear, simple, and
wrong.
— H. L. Mencken
- It was polar bear. Get it?! Polar!
- No credit is given for suggesting “physics stopped working.” However, if you answered “we are inside of a video game,” give yourself 20 points extra credit.